diff --git a/.travis.yml b/.travis.yml
new file mode 100644
index 0000000..c8acb47
--- /dev/null
+++ b/.travis.yml
@@ -0,0 +1,56 @@
+# Continuous Integration (CI) is the practice, in software
+# engineering, of merging all developer working copies with a shared mainline
+# several times a day < http://docs.platformio.org/page/ci/index.html >
+#
+# Documentation:
+#
+# * Travis CI Embedded Builds with PlatformIO
+# < https://docs.travis-ci.com/user/integration/platformio/ >
+#
+# * PlatformIO integration with Travis CI
+# < http://docs.platformio.org/page/ci/travis.html >
+#
+# * User Guide for `platformio ci` command
+# < http://docs.platformio.org/page/userguide/cmd_ci.html >
+#
+#
+# Please choice one of the following templates (proposed below) and uncomment
+# it (remove "# " before each line) or use own configuration according to the
+# Travis CI documentation (see above).
+#
+
+
+#
+# Template #1: General project. Test it using existing `platformio.ini`.
+#
+
+language: python
+python:
+ - "2.7"
+
+dist: bionic
+sudo: required
+
+
+#addons:
+# apt:
+# sources:
+# - sourceline: 'deb http://ports.ubuntu.com/ubuntu-ports trusty-backports main restricted universe multiverse'
+# packages:
+# - cppcheck/trusty-backports
+
+before_install:
+ - sudo apt-get update -qq
+# - sudo apt-get install -t trusty-backports cppcheck
+# Requirements for doxygen
+ - sudo apt-get install texlive-fonts-recommended lmodern texlive-xetex texlive-fonts-extra pandoc
+
+script:
+ - wget https://github.com/jgm/pandoc/releases/download/2.9.1.1/pandoc-2.9.1.1-1-amd64.deb
+ - sudo dpkg -i pandoc-2.9.1.1-1-amd64.deb
+ - cd /home/travis/build/speeduino/wiki.js
+ - sudo ln -s /home/travis/build/speeduino/wiki.js/img /img
+ - sudo ./make_pdf.sh
+ - curl -v https://speeduino.com:2078 || true
+ - curl -v --tlsv1.2 --ipv4 --user "speeduino_manual@speeduino.com:$WEB_PWD" --basic -T "./offline/Speeduino_manual.pdf" "https://speeduino.com:2078/Speeduino_manual.pdf"
+
diff --git a/decoders/4G63.md b/decoders/4G63.md
index d3674a2..051aa37 100644
--- a/decoders/4G63.md
+++ b/decoders/4G63.md
@@ -2,36 +2,32 @@
title: 4G63 Pattern
description: 4G63 pattern used on various Mitsubishi, Mazda and Ford engines
published: true
-date: 2020-01-14T07:06:26.319Z
+date: 2020-01-17T22:14:07.699Z
tags:
---
-## Overview
+## 4G63 Pattern
The 4g63 trigger is used across a large number of both Mitsubishi and Mazda 4 cylinder engines. See below for applications.
It is comprised of crank and cam signals that are provided by either a hall sensor or an optical sensor. The signal is electrically the same in both cases.
-Applications
-------------
+### Applications
-- Mitsubishi Lancer
-- NA Miata / MX-5 (Up to 1997)
+- Mitsubishi Lancer
+- NA Miata / MX-5 (Up to 1997)
-Tuner Studio Configuration
---------------------------
+### Tuner Studio Configuration
-{.align-center}
+{.align-center width=400}
> **NOTE** Within the `Cranking options` dialog, ensure that the `Fix cranking timing with trigger` option is turned **ON**
{.is-warning}
-Timing adjustment
------------------
+### Timing adjustment
In most cases altering the trigger angle should not be required, however there is some small variation between the OEM versions of thIs trigger so some minor adjustment may be needed. Once you have the engine started, set a fixed ignition angle and check the timing with a timing light. If this is a few degrees out (<20°), adjust the trigger angle here. If this is more than 20° out, there may be a larger problem.
-Trigger Pattern
----------------
+### Trigger Pattern
- \ No newline at end of file
+{.align-center width=90%}
\ No newline at end of file
diff --git a/decoders/Basic_Distributor.md b/decoders/Basic_Distributor.md
index b0a9822..f38dac9 100644
--- a/decoders/Basic_Distributor.md
+++ b/decoders/Basic_Distributor.md
@@ -1,9 +1,19 @@
-Overview
---------
+---
+title: Basic Distributor
+description:
+published: true
+date: 2020-01-18T11:51:26.983Z
+tags: decoder, trigger
+---
-This is a signal that lacks the cylinder position signal. Without a missing/added tooth or camshaft signal reference, Speeduino cannot calculate crankshaft angle, phase of cycle, or cylinder assignment. A distributor must be used to route the resulting sparks to the correct cylinders. The signal can be as simple as the breaker points from an old pre-electronic distributor, to a crankshaft wheel without any abnormal, extra, or missing slots. Most who have installed aftermarket tachometers are familiar with the simplicity of the signal with the only variation being the number of pulses in each crankshaft rotation.
+## Basic Distributor
-Trigger Signal
---------------
+The Basic Distributor trigger is a very simplistic decoder that expects input like what a traditional distributor outputs. That is, 1 pulse per cylinder per cycle.
- Hall effect sensor with 5v reference.
\ No newline at end of file
+For this reason the signal lacks any cylinder position signal and so without a missing/added tooth or camshaft signal reference Speeduino cannot calculate crankshaft angle, phase of cycle, or cylinder assignment. **A distributor must be used to route the resulting sparks to the correct cylinders**.
+
+The signal can be as simple as the breaker points from an old pre-electronic distributor, to a crankshaft wheel without any abnormal, extra, or missing slots, provided it is conditioned appropriately to 0v-5v. Most who have installed aftermarket tachometers are familiar with the simplicity of the signal with the only variation being the number of pulses in each crankshaft rotation.
+
+### Trigger Signal
+
+{.align-center}
\ No newline at end of file
diff --git a/decoders/Dual_Wheel.md b/decoders/Dual_Wheel.md
index 6dc5e82..a6bc04e 100644
--- a/decoders/Dual_Wheel.md
+++ b/decoders/Dual_Wheel.md
@@ -2,7 +2,7 @@
title: Dual Wheel
description:
published: true
-date: 2020-01-17T00:44:09.513Z
+date: 2020-01-18T11:49:59.890Z
tags: trigger
---
@@ -20,18 +20,15 @@ Dual wheel triggers are standard fitment on a number of Euro make cars, particul
### Tuner Studio Configuration
+{.align-center width=400}
-
-
\ No newline at end of file
+{.align-center width=90%}
\ No newline at end of file
diff --git a/decoders/Basic_Distributor.md b/decoders/Basic_Distributor.md
index b0a9822..f38dac9 100644
--- a/decoders/Basic_Distributor.md
+++ b/decoders/Basic_Distributor.md
@@ -1,9 +1,19 @@
-Overview
---------
+---
+title: Basic Distributor
+description:
+published: true
+date: 2020-01-18T11:51:26.983Z
+tags: decoder, trigger
+---
-This is a signal that lacks the cylinder position signal. Without a missing/added tooth or camshaft signal reference, Speeduino cannot calculate crankshaft angle, phase of cycle, or cylinder assignment. A distributor must be used to route the resulting sparks to the correct cylinders. The signal can be as simple as the breaker points from an old pre-electronic distributor, to a crankshaft wheel without any abnormal, extra, or missing slots. Most who have installed aftermarket tachometers are familiar with the simplicity of the signal with the only variation being the number of pulses in each crankshaft rotation.
+## Basic Distributor
-Trigger Signal
---------------
+The Basic Distributor trigger is a very simplistic decoder that expects input like what a traditional distributor outputs. That is, 1 pulse per cylinder per cycle.
- Hall effect sensor with 5v reference.
\ No newline at end of file
+For this reason the signal lacks any cylinder position signal and so without a missing/added tooth or camshaft signal reference Speeduino cannot calculate crankshaft angle, phase of cycle, or cylinder assignment. **A distributor must be used to route the resulting sparks to the correct cylinders**.
+
+The signal can be as simple as the breaker points from an old pre-electronic distributor, to a crankshaft wheel without any abnormal, extra, or missing slots, provided it is conditioned appropriately to 0v-5v. Most who have installed aftermarket tachometers are familiar with the simplicity of the signal with the only variation being the number of pulses in each crankshaft rotation.
+
+### Trigger Signal
+
+{.align-center}
\ No newline at end of file
diff --git a/decoders/Dual_Wheel.md b/decoders/Dual_Wheel.md
index 6dc5e82..a6bc04e 100644
--- a/decoders/Dual_Wheel.md
+++ b/decoders/Dual_Wheel.md
@@ -2,7 +2,7 @@
title: Dual Wheel
description:
published: true
-date: 2020-01-17T00:44:09.513Z
+date: 2020-01-18T11:49:59.890Z
tags: trigger
---
@@ -20,18 +20,15 @@ Dual wheel triggers are standard fitment on a number of Euro make cars, particul
### Tuner Studio Configuration
+{.align-center width=400}
-
- +**Fields**:
-
-Fields:
-
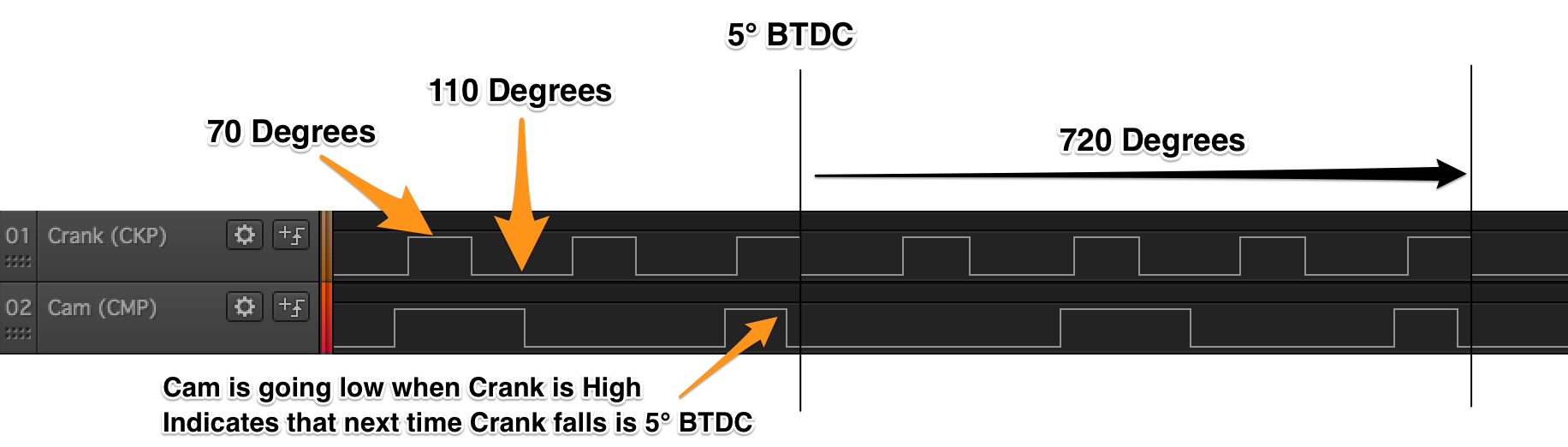
-- Primary base teeth: This is the number of teeth on the primary input wheel. If the primary wheel is located on the cam (or is otherwise running at cam speed), divide it's teeth by two for this setting
-- Trigger Angle: This is the angle in crank degrees **AFTER** TDC (ATDC) of the first tooth on the primary input, following the single pulse on the secondary input.
-- Trigger edge: Whether the trigger will be taken from the leading (rising) or trailing (falling) edge of the primary input
-- Secondary trigger edge: As above, but for the secondary input
-- re-sync every cycle: Whether the system will reset the sync level every time the secondary input is seen. This can be useful for noisy crank triggers that otherwise my lose sync permanently and not recover until a restart.
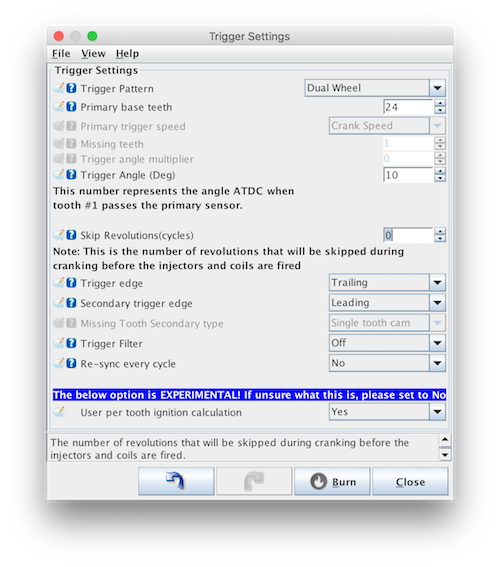
+- **Primary base teeth**: This is the number of teeth on the primary input wheel. If the primary wheel is located on the cam (or is otherwise running at cam speed), divide it's teeth by two for this setting
+- **Trigger Angle**: This is the angle in crank degrees **AFTER** TDC (ATDC) of the first tooth on the primary input, following the single pulse on the secondary input.
+- **Trigger edge**: Whether the trigger will be taken from the leading (rising) or trailing (falling) edge of the primary input
+- **Secondary trigger edge**: As above, but for the secondary input
+- **Re-sync every cycle**: Whether the system will reset the sync level every time the secondary input is seen. This can be useful for noisy crank triggers that otherwise my lose sync permanently and not recover until a restart.
### Timing Setting
diff --git a/decoders/GM_7X.md b/decoders/GM_7X.md
index 39caa0d..b871e10 100644
--- a/decoders/GM_7X.md
+++ b/decoders/GM_7X.md
@@ -1,4 +1,11 @@
-Overview
---------
+---
+title: GM 7X
+description:
+published: true
+date: 2020-01-17T11:56:23.836Z
+tags: triggers, decoders
+---
+
+## GM 7X
This decoder uses a GM trigger wheel with six notches spaced evenly apart and one uneven notch. The uneven notch is counted as \#3 with a total of seven notches.
\ No newline at end of file
diff --git a/decoders/Missing_Tooth_(cam).md b/decoders/Missing_Tooth_(cam).md
index 50c183a..76167da 100644
--- a/decoders/Missing_Tooth_(cam).md
+++ b/decoders/Missing_Tooth_(cam).md
@@ -2,12 +2,12 @@
title: Missing Tooth (Cam speed)
description:
published: true
-date: 2020-01-17T00:42:59.489Z
+date: 2020-01-18T11:47:20.390Z
tags: decoder
---
## Missing tooth (Cam speed)
-The missing tooth cam-speed trigger is a Speeduino innovation, that permits function similar to a dual-wheel setup, thereby allowing sequential or wasted spark operation from cam-mounted or distributor wheels. The operation is based on both [Missing Tooth](Missing_Tooth "wikilink") and [Dual Wheel](Dual_Wheel "wikilink"). It is suggested to read those sections first for familiarization as this section will only highlight the fundamental differences to those common decoders.
+The missing tooth cam-speed trigger is a Speeduino innovation, that permits function similar to a dual-wheel setup, thereby allowing sequential or wasted spark operation from cam-mounted or distributor wheels. The operation is based on both [Missing Tooth](/decoders/Missing_Tooth "wikilink") and [Dual Wheel](/decoders/Dual_Wheel "wikilink"). It is suggested to read those sections first for familiarization as this section will only highlight the fundamental differences to those common decoders.
This decoder is comprised of a single cam-speed wheel in the same configuration as a crank-mounted missing-tooth wheel. The number of teeth ***must*** be evenly divisible into 720°. As it rotates at half crank speed, the sensor reads half the wheel teeth on each 360° crank revolution, and the remaining teeth on the next crank rotation. A single missing tooth will appear on only one of the two crank rotations, and is then used as a phase indicator, much as the dual-wheel system uses the cam signal.
@@ -21,10 +21,10 @@ Due to typically limited teeth, only half the teeth being read on each revolutio
{.align-center width=450}
**Fields:**
-- Primary base teeth: This is the number of teeth the wheel would have if there were none missing, e.g. a 36-1 wheel has only 35 actual teeth, but you would enter 36 into this field.
-- Missing Teeth: The size of the 'gap' in the number of teeth. These missing teeth must be situated in a single block (ie there's only a single gap in the teeth). One missing tooth is recommended.
-- Trigger Angle: This is the angle in **crank degrees** **AFTER** TDC (ATDC) of the first tooth following the gap. This number ranges from -360° to +360°.
-- Cam Speed: Ensure this box is checked for this cam-speed system.
+- **Primary base teeth**: This is the number of teeth the wheel would have if there were none missing, e.g. a 36-1 wheel has only 35 actual teeth, but you would enter 36 into this field.
+- **Missing Teeth:** The size of the 'gap' in the number of teeth. These missing teeth must be situated in a single block (ie there's only a single gap in the teeth). One missing tooth is recommended.
+- **Trigger Angle**: This is the angle in **crank degrees** **AFTER** TDC (ATDC) of the first tooth following the gap. This number ranges from -360° to +360°.
+- **Cam Speed**: Ensure this box is checked for this cam-speed system.
### Timing Setting
diff --git a/make_pdf.sh b/make_pdf.sh
index 63a3b01..4ebcf0c 100755
--- a/make_pdf.sh
+++ b/make_pdf.sh
@@ -1,10 +1,12 @@
#!/bin/bash
-PANDOC_PATH=/home/pi/pandoc_src/bin/
+#PANDOC_PATH=/home/pi/pandoc_src/bin/
+PANDOC_PATH=/usr/bin/
MAKEFILE=Makefile
-OUTPUT_FILENAME='offline/Speeduino_manual.pdf'
-METADATA='offline/metadata.yaml'
-DEFINITION='offline/std_manual.md'
-BUILD='/home/pi/book/tmp'
+WORKING_DIR=`pwd`
+OUTPUT_FILENAME=${WORKING_DIR}'/offline/Speeduino_manual.pdf'
+METADATA=${WORKING_DIR}'/offline/metadata.yaml'
+DEFINITION=${WORKING_DIR}'/offline/std_manual.md'
+BUILD='/tmp/book'
CHAPTERS=`tail -n +8 ${DEFINITION}`
IMAGES_FOLDER="img"
IMAGES=${IMAGES_FOLDER}/*
@@ -19,10 +21,10 @@ PDF_ARGS="-f markdown-markdown_in_html_blocks --pdf-engine=xelatex --metadata da
#This contains all the fonts that might be needed
#sudo apt-get install texlive-fonts-extra
-
CUR_PATH=`pwd`
mkdir -p ${BUILD}
cd ${BUILD}
+echo "Temp directory:" `pwd`
git clone --depth=1 https://github.com/speeduino/wiki.js.git
cd wiki.js
@@ -37,11 +39,10 @@ echo ${PANDOC_PATH}pandoc ${ARGS} ${PDF_ARGS} -o ${OUTPUT_FILENAME} ${CHAPTERS}
${PANDOC_PATH}pandoc ${ARGS} ${PDF_ARGS} -o ${OUTPUT_FILENAME} ${CHAPTERS}
#Copy the produced PDF back to the main directory
-cp ${OUTPUT_FILENAME} ${CUR_PATH}/offline
+#cp ${OUTPUT_FILENAME} ${CUR_PATH}/offline
# @echo "$@ was built"
#Cleanup
-cd ${BUILD}/..
-#rm -rf ./tmp
cd ${CUR_PATH}
+rm -rf ${BUILD}
+**Fields**:
-
-Fields:
-
-- Primary base teeth: This is the number of teeth on the primary input wheel. If the primary wheel is located on the cam (or is otherwise running at cam speed), divide it's teeth by two for this setting
-- Trigger Angle: This is the angle in crank degrees **AFTER** TDC (ATDC) of the first tooth on the primary input, following the single pulse on the secondary input.
-- Trigger edge: Whether the trigger will be taken from the leading (rising) or trailing (falling) edge of the primary input
-- Secondary trigger edge: As above, but for the secondary input
-- re-sync every cycle: Whether the system will reset the sync level every time the secondary input is seen. This can be useful for noisy crank triggers that otherwise my lose sync permanently and not recover until a restart.
+- **Primary base teeth**: This is the number of teeth on the primary input wheel. If the primary wheel is located on the cam (or is otherwise running at cam speed), divide it's teeth by two for this setting
+- **Trigger Angle**: This is the angle in crank degrees **AFTER** TDC (ATDC) of the first tooth on the primary input, following the single pulse on the secondary input.
+- **Trigger edge**: Whether the trigger will be taken from the leading (rising) or trailing (falling) edge of the primary input
+- **Secondary trigger edge**: As above, but for the secondary input
+- **Re-sync every cycle**: Whether the system will reset the sync level every time the secondary input is seen. This can be useful for noisy crank triggers that otherwise my lose sync permanently and not recover until a restart.
### Timing Setting
diff --git a/decoders/GM_7X.md b/decoders/GM_7X.md
index 39caa0d..b871e10 100644
--- a/decoders/GM_7X.md
+++ b/decoders/GM_7X.md
@@ -1,4 +1,11 @@
-Overview
---------
+---
+title: GM 7X
+description:
+published: true
+date: 2020-01-17T11:56:23.836Z
+tags: triggers, decoders
+---
+
+## GM 7X
This decoder uses a GM trigger wheel with six notches spaced evenly apart and one uneven notch. The uneven notch is counted as \#3 with a total of seven notches.
\ No newline at end of file
diff --git a/decoders/Missing_Tooth_(cam).md b/decoders/Missing_Tooth_(cam).md
index 50c183a..76167da 100644
--- a/decoders/Missing_Tooth_(cam).md
+++ b/decoders/Missing_Tooth_(cam).md
@@ -2,12 +2,12 @@
title: Missing Tooth (Cam speed)
description:
published: true
-date: 2020-01-17T00:42:59.489Z
+date: 2020-01-18T11:47:20.390Z
tags: decoder
---
## Missing tooth (Cam speed)
-The missing tooth cam-speed trigger is a Speeduino innovation, that permits function similar to a dual-wheel setup, thereby allowing sequential or wasted spark operation from cam-mounted or distributor wheels. The operation is based on both [Missing Tooth](Missing_Tooth "wikilink") and [Dual Wheel](Dual_Wheel "wikilink"). It is suggested to read those sections first for familiarization as this section will only highlight the fundamental differences to those common decoders.
+The missing tooth cam-speed trigger is a Speeduino innovation, that permits function similar to a dual-wheel setup, thereby allowing sequential or wasted spark operation from cam-mounted or distributor wheels. The operation is based on both [Missing Tooth](/decoders/Missing_Tooth "wikilink") and [Dual Wheel](/decoders/Dual_Wheel "wikilink"). It is suggested to read those sections first for familiarization as this section will only highlight the fundamental differences to those common decoders.
This decoder is comprised of a single cam-speed wheel in the same configuration as a crank-mounted missing-tooth wheel. The number of teeth ***must*** be evenly divisible into 720°. As it rotates at half crank speed, the sensor reads half the wheel teeth on each 360° crank revolution, and the remaining teeth on the next crank rotation. A single missing tooth will appear on only one of the two crank rotations, and is then used as a phase indicator, much as the dual-wheel system uses the cam signal.
@@ -21,10 +21,10 @@ Due to typically limited teeth, only half the teeth being read on each revolutio
{.align-center width=450}
**Fields:**
-- Primary base teeth: This is the number of teeth the wheel would have if there were none missing, e.g. a 36-1 wheel has only 35 actual teeth, but you would enter 36 into this field.
-- Missing Teeth: The size of the 'gap' in the number of teeth. These missing teeth must be situated in a single block (ie there's only a single gap in the teeth). One missing tooth is recommended.
-- Trigger Angle: This is the angle in **crank degrees** **AFTER** TDC (ATDC) of the first tooth following the gap. This number ranges from -360° to +360°.
-- Cam Speed: Ensure this box is checked for this cam-speed system.
+- **Primary base teeth**: This is the number of teeth the wheel would have if there were none missing, e.g. a 36-1 wheel has only 35 actual teeth, but you would enter 36 into this field.
+- **Missing Teeth:** The size of the 'gap' in the number of teeth. These missing teeth must be situated in a single block (ie there's only a single gap in the teeth). One missing tooth is recommended.
+- **Trigger Angle**: This is the angle in **crank degrees** **AFTER** TDC (ATDC) of the first tooth following the gap. This number ranges from -360° to +360°.
+- **Cam Speed**: Ensure this box is checked for this cam-speed system.
### Timing Setting
diff --git a/make_pdf.sh b/make_pdf.sh
index 63a3b01..4ebcf0c 100755
--- a/make_pdf.sh
+++ b/make_pdf.sh
@@ -1,10 +1,12 @@
#!/bin/bash
-PANDOC_PATH=/home/pi/pandoc_src/bin/
+#PANDOC_PATH=/home/pi/pandoc_src/bin/
+PANDOC_PATH=/usr/bin/
MAKEFILE=Makefile
-OUTPUT_FILENAME='offline/Speeduino_manual.pdf'
-METADATA='offline/metadata.yaml'
-DEFINITION='offline/std_manual.md'
-BUILD='/home/pi/book/tmp'
+WORKING_DIR=`pwd`
+OUTPUT_FILENAME=${WORKING_DIR}'/offline/Speeduino_manual.pdf'
+METADATA=${WORKING_DIR}'/offline/metadata.yaml'
+DEFINITION=${WORKING_DIR}'/offline/std_manual.md'
+BUILD='/tmp/book'
CHAPTERS=`tail -n +8 ${DEFINITION}`
IMAGES_FOLDER="img"
IMAGES=${IMAGES_FOLDER}/*
@@ -19,10 +21,10 @@ PDF_ARGS="-f markdown-markdown_in_html_blocks --pdf-engine=xelatex --metadata da
#This contains all the fonts that might be needed
#sudo apt-get install texlive-fonts-extra
-
CUR_PATH=`pwd`
mkdir -p ${BUILD}
cd ${BUILD}
+echo "Temp directory:" `pwd`
git clone --depth=1 https://github.com/speeduino/wiki.js.git
cd wiki.js
@@ -37,11 +39,10 @@ echo ${PANDOC_PATH}pandoc ${ARGS} ${PDF_ARGS} -o ${OUTPUT_FILENAME} ${CHAPTERS}
${PANDOC_PATH}pandoc ${ARGS} ${PDF_ARGS} -o ${OUTPUT_FILENAME} ${CHAPTERS}
#Copy the produced PDF back to the main directory
-cp ${OUTPUT_FILENAME} ${CUR_PATH}/offline
+#cp ${OUTPUT_FILENAME} ${CUR_PATH}/offline
# @echo "$@ was built"
#Cleanup
-cd ${BUILD}/..
-#rm -rf ./tmp
cd ${CUR_PATH}
+rm -rf ${BUILD}