4.1 KiB
FT86 cars (Subaru BRZ, Toyota 86, Scion FR-S)
Here is information on some of the PIDs that you're most likely to use with RaceChrono and equations to get the right scale, etc.
PID 0xD0
Update frequency: 50 times per second.
| Channel name | Equation | Notes |
|---|---|---|
| Steering angle | bytesToIntLe(raw, 0, 2) * 0.1 | |
| Z rate of rotation | bytesToIntLe(raw, 2, 2) * -0.318309886 | The multiplier is 1/pi, but maybe should be 0.9 / pi |
| ??? | bytes 4, 5 | |
| Lateral acceleration | bytesToIntLe(raw, 6, 1) * 0.2 | Not 100% sure about the multiplier, but looks about right |
| Longitudinal acceleration | bytesToIntLe(raw, 7, 1) * -0.1 | Not 100% sure about the multiplier, but looks about right |
| Combined acceleration | sqrt(pow2(bytesToIntLe(raw, 6, 1) * 0.2) + pow2(bytesToIntLe(raw, 7, 1) * 0.1)) |
PID 0xD1
Update frequency: 50 times per second.
| Channel name | Equation | Notes |
|---|---|---|
| Speed | bytesToIntLe(raw, 0, 2) * 0.01569358787 | May want to check the multiplier against an external GPS device |
| Brake position | min(C / 0.7, 100) | The third byte is the pressure in the brake system, in Bars. The 0.7 divider seems to be a good value to get 100% at pressure slightly higher than those you're likely to use on the track for cars with no aero. You can use 0.8 or 0.9 if you see 100% too often. |
PID 0xD4
Update frequency: 50 times per second.
| Channel name | Equation | Notes |
|---|---|---|
| Wheel speed FL | bytesToIntLe(raw, 0, 2) * 0.01569358787 | Use same multiplier as for speed in 0xD1 |
| Wheel speed FR | bytesToIntLe(raw, 2, 2) * 0.01569358787 | Use same multiplier as for speed in 0xD1 |
| Wheel speed RL | bytesToIntLe(raw, 4, 2) * 0.01569358787 | Use same multiplier as for speed in 0xD1 |
| Wheel speed RR | bytesToIntLe(raw, 6, 2) * 0.01569358787 | Use same multiplier as for speed in 0xD1 |
PID 0x140
Update frequency: 100 times per second.
| Channel name | Equation | Notes |
|---|---|---|
| Accelerator position | A / 2.55 | |
| Clutch position | (B & 0x80) / 1.28 | On/off only |
| Engine RPM | C + (D & 63) * 256 | |
| ??? | byte 4 | |
| Throttle position | F / 2.55 | Not tested |
| ??? | bytes 6, 7 |
PID 0x141
Update frequency: 100 times per second.
| Channel name | Equation | Notes |
|---|---|---|
| Gear | G & 0xF | Not tested much. The value seems to jump so much that the usefulness is questionable. |
Given how frequently 0x141 messages are sent, I presume there's a lot more interesting info there.
PID 0x360
Update frequency: 20 times per second.
| Channel name | Equation |
|---|---|
| Engine oil temperature | C - 40 |
| Coolant temperature | D - 40 |
TODO: would be great to find how to read the ambient temperature, and maybe the intake temperature.
TODO: find how to log the fuel remaining.
Connections
Besides the CAN pins in the OBD-II port, there is a CAN bus male port hidden behind the car multimedia head unit:

It's very close to the glovebox, which makes it great for putting your CAN reader in the glovebox. Such a placement makes sure it's out of the way and you won't accidentally hit it with your leg while on the track, and also allows quick access for troubleshooting and experimenting. There's also a second 12V port inside the glovebox, which makes it easy to use a 12V-to-USB adapter instead of adding a 12V-to-5V converter to your hardware design.
You can use the two middle pins of a Toyota radio harness to connect to the CAN bus in a reliable way.
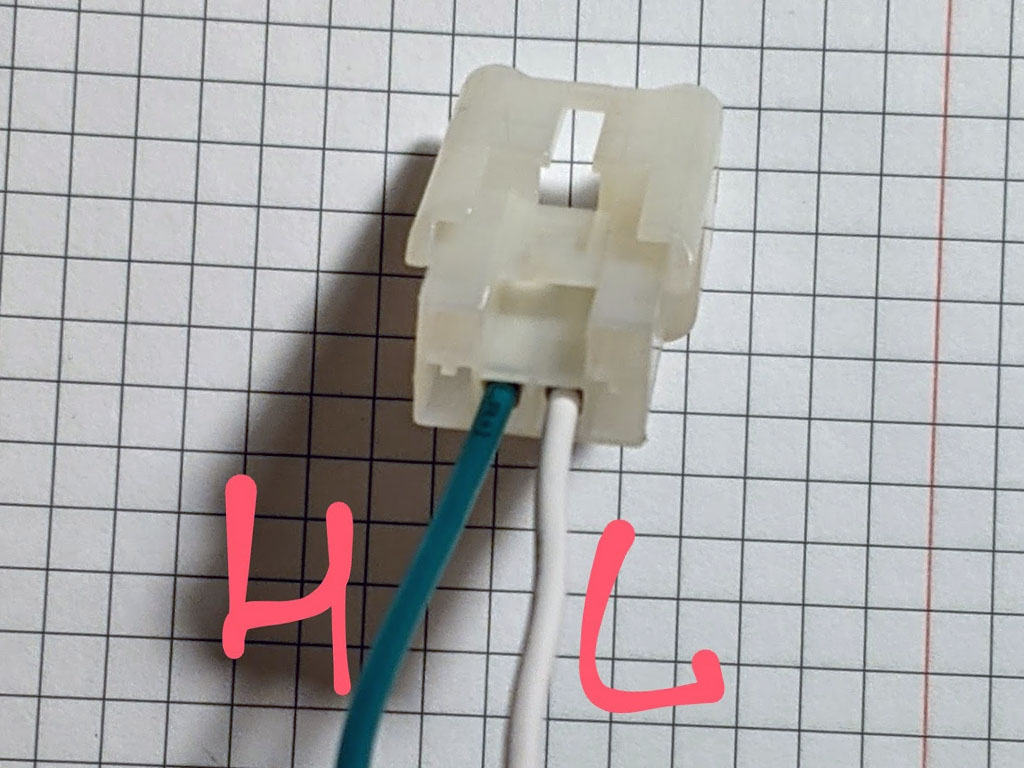
It's recommended to use a ~60–90 cm (2–3') twisted pair cable between that port and your CAN reader. I would strongly discourage you from using the screw terminals on the MCP2515 board, as if the cable comes loose it can cause a short circuit in the CAN bus (ask me how I know), which will throw a MIL at best, and who knows what at worst if it happens on the track. Instead, I attached a female JST SM connector to the cable.
