convert some links using script, and fix some manually
This commit is contained in:
parent
e151162f93
commit
a6c27028f4
|
|
@ -1,6 +1,6 @@
|
|||
Github Actions is currently in charge of:
|
||||
|
||||
* Firmware Builds: continues integration publishing at https://rusefi.com/build_server/
|
||||
* Firmware Builds: continues integration publishing at [https://rusefi.com/build_server/](https://rusefi.com/build_server/)
|
||||
* Console Builds
|
||||
* Simulator Builds
|
||||
* Android App Builds
|
||||
|
|
@ -28,7 +28,7 @@ We have tried to keep Jenkins working in case we need to revert to it.
|
|||
5) git2svn_sync
|
||||
|
||||
### Install Cygwin
|
||||
https://cygwin.com/install.html
|
||||
[Download Cygwin](https://cygwin.com/install.html)
|
||||
|
||||
Cygwin packages that need to be installed:
|
||||
|
||||
|
|
@ -49,23 +49,23 @@ Cygwin packages that need to be installed:
|
|||
- graphviz
|
||||
|
||||
### Install Java JDK 8
|
||||
https://www.oracle.com/java/technologies/javase/javase-jdk8-downloads.html
|
||||
[Download JDK 8](https://www.oracle.com/java/technologies/javase/javase-jdk8-downloads.html)
|
||||
|
||||
### Install Ant:
|
||||
https://ant.apache.org/
|
||||
[Download Ant](https://ant.apache.org/)
|
||||
|
||||
### Install Jenkins
|
||||
https://jenkins.io/download/
|
||||
[Download Jenkins](https://jenkins.io/download/)
|
||||
|
||||
### Install Kicad
|
||||
https://www.kicad.org/download/
|
||||
[Download Kicad](https://www.kicad.org/download/)
|
||||
for iBom automation
|
||||
|
||||
### Install for Hardware Testing
|
||||
#### ST Link Utility
|
||||
http://www.st.com/st-web-ui/static/active/en/st_prod_software_internet/resource/technical/software/utility/stsw-link004.zip
|
||||
[STM32 ST-Link Utility](http://www.st.com/st-web-ui/static/active/en/st_prod_software_internet/resource/technical/software/utility/stsw-link004.zip)
|
||||
#### ST Virtual Serial Driver
|
||||
http://www.st.com/web/en/catalog/tools/PF257938
|
||||
[STM32 Virtual COM Port Driver](http://www.st.com/web/en/catalog/tools/PF257938)
|
||||
|
||||
### System Environment Variables:
|
||||
|Variable|Example|
|
||||
|
|
@ -92,9 +92,9 @@ http://www.st.com/web/en/catalog/tools/PF257938
|
|||
#### Additional plugins:
|
||||
- Pipeline GitHub Notify Step
|
||||
|
||||
https://stackoverflow.com/questions/14274293/show-current-state-of-jenkins-build-on-github-repo
|
||||
[Show current state of Jenkins build on GitHub repo](https://stackoverflow.com/questions/14274293/show-current-state-of-jenkins-build-on-github-repo)
|
||||
|
||||
https://github.com/settings/tokens
|
||||
[https://github.com/settings/tokens](https://github.com/settings/tokens)
|
||||
|
||||
Discard Old Build
|
||||
|
||||
|
|
|
|||
|
|
@ -48,5 +48,5 @@ TLE7209 is an example of two-wire mode.
|
|||
|
||||
# Pinouts
|
||||
|
||||
See https://raw.githubusercontent.com/wiki/rusefi/rusefi_documentation/oem_docs/VAG/Bosch_0280750009_pinout.jpg for
|
||||
See [broken link](https://raw.githubusercontent.com/wiki/rusefi/rusefi_documentation/oem_docs/VAG/Bosch_0280750009_pinout.jpg) for
|
||||
personal choice of colors for VAG ETB.
|
||||
|
|
|
|||
|
|
@ -5,7 +5,7 @@ This page is a general guide and general outline of how to use the breakout modu
|
|||

|
||||
|
||||
## Move a engine control to rusEFI
|
||||
Uses breakout module noted here http://rusefi.com/forum/viewtopic.php?f=4&t=454 This is an example of how you might move the wires, it may not work for you exactly this way, but this at least lays out the general process. For example, some setups connect all fuel channels to one ECU fuel channel. So you might need to do thing differently when trying to move one fuel channel as noted below. Items like that can vary.
|
||||
Uses breakout module noted [here](http://rusefi.com/forum/viewtopic.php?f=4&t=454) This is an example of how you might move the wires, it may not work for you exactly this way, but this at least lays out the general process. For example, some setups connect all fuel channels to one ECU fuel channel. So you might need to do thing differently when trying to move one fuel channel as noted below. Items like that can vary.
|
||||
|
||||
### Capture RPM signal
|
||||
|
||||
|
|
|
|||
|
|
@ -3,10 +3,10 @@ rusEFI Console is a handy development and debugging tool. The dev console is wri
|
|||
To get the console working follow the below procedure, which assumes you have loaded the rusEFI firmware.
|
||||
|
||||
* Either power externally, or connect the "programming" USB cable as shown below. This will provide power to the Discovery board.
|
||||
* Connect the micro USB cable, see "console" cable shown below. When you do this for the first time, on a Windows PC, you will be prompted for drivers. You should download & install the drivers from here http://www.st.com/web/en/catalog/tools/PF257938. #: 
|
||||
* Connect the micro USB cable, see "console" cable shown below. When you do this for the first time, on a Windows PC, you will be prompted for drivers. You should download & install the drivers from [here](http://www.st.com/web/en/catalog/tools/PF257938). #: 
|
||||
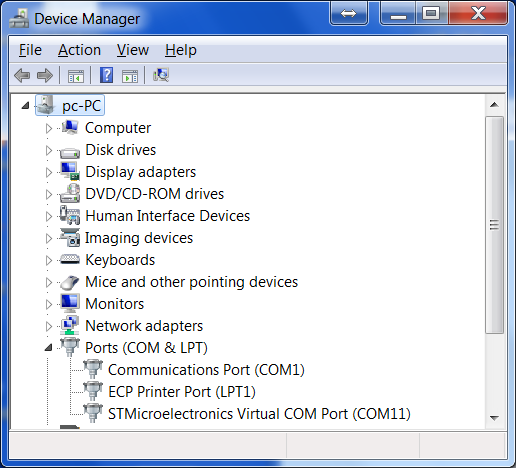
* When the driver is installed & the board is connected via the micro USB cable, you can verify serial connectivity by
|
||||
* '''Windows''' - opening your Device Manager - we are expecting to see a Virtual COM Port
|
||||
* http://rusefi.com/images/forum_posts/device_manager.png
|
||||
|
||||
* '''Linux'''
|
||||
* ''Ubuntu (11.10)'' - plug in the "console" USB cable, then check the message log with this command.
|
||||
```
|
||||
|
|
@ -17,7 +17,7 @@ To get the console working follow the below procedure, which assumes you have lo
|
|||
[10572.797285] cdc_acm 5-1:1.0: ttyACM0: USB ACM device
|
||||
```
|
||||
* In this case, the newly plugged in USB is register to ttyACM0, which you can find on /dev/ttyACM0
|
||||
* If you don't already have the Dev Console, get it http://rusefi.com/build_server/rusefi_bundle.zip (part of the same bundle) Take note rusEFI dev console required java 1.7+
|
||||
* If you don't already have the Dev Console, get it [http://rusefi.com/build_server/rusefi_bundle.zip](http://rusefi.com/build_server/rusefi_bundle.zip) (part of the same bundle) Take note rusEFI dev console required java 1.7+
|
||||
* When you launch the Dev Console, it will ask you to select which serial address it should use. However you can specify that when you launch it by specifying a command line parameter as noted below.
|
||||
* Windows
|
||||
`java -jar rusefi_console.jar COM15`
|
||||
|
|
|
|||
|
|
@ -187,4 +187,4 @@ Typical 4 cylinder engine with 200 cc/min injectors, sequential injection, base
|
|||
|
||||

|
||||
|
||||
For 1.6 Honda cranking settings see https://rusefi.com/forum/download/file.php?id=4536 (note that "base fuel" = 1 is recommended these days, with a corresponding change to cranking temperature multiplier)
|
||||
For 1.6 Honda cranking settings see [this image](https://rusefi.com/forum/download/file.php?id=4536) (note that "base fuel" = 1 is recommended these days, with a corresponding change to cranking temperature multiplier)
|
||||
|
|
|
|||
|
|
@ -38,7 +38,7 @@ microUSB channel is more sensitive to noise but it's faster
|
|||
See also [Tunerstudio Connectivity](Tunerstudio-Connectivity)
|
||||
|
||||
### Configuration reset
|
||||
Grounding PD6 resets saved configuration to default state - see http://rusefi.com/forum/viewtopic.php?f=5&t=373&p=9571&hilit=PD6#p9571
|
||||
Grounding PD6 resets saved configuration to default state - see [this forum post](http://rusefi.com/forum/viewtopic.php?f=5&t=373&p=9571&hilit=PD6#p9571)
|
||||
|
||||
### Board Testing mode
|
||||
|
||||
|
|
|
|||
|
|
@ -20,4 +20,4 @@ Part of the problem is the fact that Tuner Studio works only one way - once proj
|
|||
|
||||
TODO: we need a better solution.
|
||||
|
||||
See also https://sourceforge.net/p/rusefi/tickets/86/
|
||||
See also [https://github.com/rusefi/rusefi/issues/93](https://github.com/rusefi/rusefi/issues/93)
|
||||
|
|
|
|||
|
|
@ -22,8 +22,8 @@ RPN notation -> A B C * +
|
|||
At first look this is very confusing to read and understand but it is actually quite simple and very effective.
|
||||
|
||||
**The two videos below explain this very well and we strongly recommend watching them.**
|
||||
https://www.youtube.com/watch?v=7ha78yWRDlE
|
||||
https://www.youtube.com/watch?v=TrfcJCulsF4
|
||||
[Reverse Polish Notation and The Stack - Computerphile](https://www.youtube.com/watch?v=7ha78yWRDlE)
|
||||
[Reverse Polish Grows on Trees - Computerphile](https://www.youtube.com/watch?v=TrfcJCulsF4)
|
||||
|
||||
|
||||
The TLDR is that the processor is critical to how this notation works, if a value is a number it loads it onto its "stack" if a value is an operator it performs an operation on the numbers in the stack.
|
||||
|
|
@ -113,7 +113,7 @@ FSIO setting 6 has been configured for an adjustable RPM limiter, this can be co
|
|||
|
||||
# See [legacy wiki](https://rusefi.com/wiki/index.php?title=Manual:Flexible_Logic) content below.
|
||||
|
||||
Fuel pump is already using this mechanism - see https://github.com/rusefi/rusefi/blob/master/firmware/controllers/system_fsio.txt
|
||||
Fuel pump is already using this mechanism - see [[https://github.com/rusefi/rusefi/blob/master/firmware/controllers/system_fsio.txt](https://github.com/rusefi/rusefi/blob/master/firmware/controllers/system_fsio.txt)](https://github.com/rusefi/rusefi/blob/master/firmware/controllers/system_fsio.txt)
|
||||
|
||||
Here are some commands to try:
|
||||
|
||||
|
|
@ -142,7 +142,7 @@ set_fsio_output_pin 1 pd11
|
|||
Tells output #1 to use pin PD11
|
||||
|
||||
|
||||
See https://github.com/rusefi/rusefi/blob/master/firmware/controllers/core/fsio_impl.cpp for list of available methods
|
||||
See [https://github.com/rusefi/rusefi/blob/master/firmware/controllers/core/fsio_impl.cpp](https://github.com/rusefi/rusefi/blob/master/firmware/controllers/core/fsio_impl.cpp) for list of available methods
|
||||
|
||||
---
|
||||
|
||||
|
|
@ -312,7 +312,7 @@ Here is how this would look in Tuner Studio:
|
|||
|
||||
That's RPN notation for "(rpm > 6000) * 0.8"
|
||||
|
||||
See https://github.com/rusefi/rusefi/blob/master/firmware/controllers/system_fsio.txt see https://github.com/rusefi/rusefi/blob/master/firmware/controllers/system_fsio.h
|
||||
See [https://github.com/rusefi/rusefi/blob/master/firmware/controllers/system_fsio.txt](https://github.com/rusefi/rusefi/blob/master/firmware/controllers/system_fsio.txt) see [https://github.com/rusefi/rusefi/blob/master/firmware/controllers/system_fsio.h](https://github.com/rusefi/rusefi/blob/master/firmware/controllers/system_fsio.h)
|
||||
|
||||
|
||||

|
||||
|
|
@ -336,11 +336,11 @@ set debug_mode 23
|
|||
|
||||
[Debug Fields](Debug-Fields)
|
||||
|
||||
https://www.youtube.com/watch?v=nrIrtdn-Nc0
|
||||
[FSIO warning light via rusEfi console](https://www.youtube.com/watch?v=nrIrtdn-Nc0)
|
||||
|
||||
https://www.youtube.com/watch?v=eA4clVtklZ8
|
||||
[FSIO warning light via TunerStudio](https://www.youtube.com/watch?v=eA4clVtklZ8)
|
||||
|
||||
---
|
||||
|
||||
## Pin naming usability issue
|
||||
We have a usability feature with microRusEFI where stm32 pin names are hidden from users. Unfortunately for FSIO these smt32 pin names are needed. Those are visible in https://github.com/rusefi/rusefi/blob/master/firmware/config/boards/microrusefi/mapping.yaml
|
||||
We have a usability feature with microRusEFI where stm32 pin names are hidden from users. Unfortunately for FSIO these smt32 pin names are needed. Those are visible in the yaml files in each board's connector directory, e.g. [https://github.com/rusefi/rusefi/blob/master/firmware/config/boards/microrusefi/connectors/main.yaml](https://github.com/rusefi/rusefi/blob/master/firmware/config/boards/microrusefi/connectors/main.yaml)
|
||||
|
|
|
|||
|
|
@ -2,4 +2,4 @@ The challenge of rusEFI as of 2020 is the fact that hardware is way ahead of sof
|
|||
|
||||
But if for any reason you would prefer to use rusEFI and look for any specific feature, money can probably help you!
|
||||
|
||||
See also https://rusefi.com/forum/viewtopic.php?f=5&t=1642
|
||||
See also [the Feature Requests - Feature Bounty Program forum thread](https://rusefi.com/forum/viewtopic.php?f=5&t=1642)
|
||||
|
|
|
|||
|
|
@ -48,7 +48,7 @@ TBD
|
|||
see also [Fuel Overview](Fuel-Overview)
|
||||
see also [Ignition](Ignition)
|
||||
see also [Idle Control](Idle-Control)
|
||||
see also http://rusefi.com/forum/viewtopic.php?f=2&t=1124&p=21278
|
||||
see also [this forum thread](http://rusefi.com/forum/viewtopic.php?f=2&t=1124&p=21278)
|
||||
|
||||
## Share your tune
|
||||
|
||||
|
|
|
|||
|
|
@ -11,7 +11,7 @@ Enable-WindowsOptionalFeature -Online -FeatureName Microsoft-Windows-Subsystem-L
|
|||
|
||||
2. Download linux
|
||||
Download the appx for linux 2004 from here:
|
||||
https://docs.microsoft.com/en-us/windows/wsl/install-manual
|
||||
[WSL Install Manual](https://docs.microsoft.com/en-us/windows/wsl/install-manual)
|
||||
Or type the following into powershell:
|
||||
cd ubuntu/
|
||||
Invoke-WebRequest -Uri https://aka.ms/wsl-ubuntu-2004 -OutFile Ubuntu.appx -UseBasicParsing
|
||||
|
|
|
|||
|
|
@ -1,6 +1,6 @@
|
|||
|
||||
|
||||
https://youtu.be/24bNFu7a9lc
|
||||
[AMPSEAL Connector Tutorial](https://youtu.be/24bNFu7a9lc)
|
||||
|
||||
If your pins are not loose, use nice wire cutters to separate individual terminals from the loom - do not bend break terminals from the loom.
|
||||
|
||||
|
|
|
|||
|
|
@ -28,7 +28,7 @@ A: No. We have a small portion of STM32CubeProgramer embedded into rusEFI consol
|
|||
|
||||
## Q: I am using the buttons but it simply does not work?
|
||||
|
||||
A: We have a report of this at https://www.rusefi.com/forum/viewtopic.php?p=42317#p42317. For now please keep trying!
|
||||
A: We have a report of this [here](https://www.rusefi.com/forum/viewtopic.php?p=42317#p42317). For now please keep trying!
|
||||
|
||||
## Q: I have a Mac? Or even better I have a Linux device?
|
||||
|
||||
|
|
@ -36,4 +36,4 @@ A: rusEFI console firmware functionality currently runs on Windows only.
|
|||
|
||||
## Q: Do you have any ST-Link provisions?
|
||||
|
||||
Some boards have [Tag-Connect-TC2030] upwards three of those! Some boards have an unofficial (?) ST-Link V2 pinout. Both are intended for software developers while debugging issues, those are not intended for firmware update/recovery.
|
||||
Some boards have [Tag-Connect-TC2030] upwards three of those! Some boards have an unofficial (?) ST-Link V2 pinout. Both are intended for software developers while debugging issues, those are not intended for firmware update/recovery.
|
||||
|
|
|
|||
|
|
@ -1,4 +1,4 @@
|
|||
https://rusefi.com/forum/viewtopic.php?f=4&t=1564
|
||||
[bosch 7506280 GDI driver](https://rusefi.com/forum/viewtopic.php?f=4&t=1564)
|
||||
|
||||
[BMW e65](BMW-e65)
|
||||
|
||||
|
|
|
|||
|
|
@ -43,11 +43,11 @@ Place some place that is away from hot items like the exhaust. Mount on a piece
|
|||
* 20AWG, no larger than a 10A fuse
|
||||
* 22AWG, no larger than a 7A fuse
|
||||
* 24AWG, no larger than a 3A fuse
|
||||
Those fuse sizes are based on this table for chassis wiring. http://www.powerstream.com/Wire_Size.htm
|
||||
Those fuse sizes are based on [this table](http://www.powerstream.com/Wire_Size.htm) for chassis wiring.
|
||||
|
||||
* When selecting a fuse, you can use the below guide to help. Generally you choose the fuse and wire based on what the load needs. If your load is 1A capable, you need wire and fusing that can provide at least 1A. However you don't want too large of a wire as it adds costs, or the wire size might be to large for certain connectors, etc.
|
||||
|
||||
http://www.littelfuse.com/~/media/automotive/catalogs/littelfuse_fuseology.pdf
|
||||
[Littelfuse Fuseology](http://www.littelfuse.com/~/media/automotive/catalogs/littelfuse_fuseology.pdf)
|
||||
|
||||
* Take note there is a fatigue issue known as I2t (That's amps squared time) which is a common reason for failures after several cycles.
|
||||
|
||||
|
|
@ -55,7 +55,7 @@ http://www.littelfuse.com/~/media/automotive/catalogs/littelfuse_fuseology.pdf
|
|||
|
||||
* For Frankenso it can typically use a typical automotive blade style fuse. From page 9 of the Frankenso schematic it suggests to use a 1.5A fuse. However that was for the one mounted on the PCB, which generally has a small wire installed. The below 2A would work for an external fuse.
|
||||
|
||||
http://www.littelfuse.com/~/media/automotive/datasheets/fuses/passenger-car-and-commercial-vehicle/blade-fuses/littelfuse_mini_datasheet.pdf
|
||||
[Littelfuse Mini Datasheet](http://www.littelfuse.com/~/media/automotive/datasheets/fuses/passenger-car-and-commercial-vehicle/blade-fuses/littelfuse_mini_datasheet.pdf)
|
||||
|
||||
* Check in the forums for additional information. Often members can identify bumps in the road before you hit them. Forum members can also make suggestions that could make things go smoothly.
|
||||
|
||||
|
|
@ -67,7 +67,7 @@ http://www.littelfuse.com/~/media/automotive/datasheets/fuses/passenger-car-and-
|
|||
* Start by getting junk yard ECU
|
||||
* Delicately break apart the junk yard ECU salvaging the ECU connector and perhaps the enclosure.
|
||||

|
||||
* If you have a connector that has a break out PCB board for it, you probably want to obtain the break out PCB for that harness connector. If not you can simply solder wires direct to the connector. Similar to this http://rusefi.com/forum/viewtopic.php?f=4&t=507
|
||||
* If you have a connector that has a break out PCB board for it, you probably want to obtain the break out PCB for that harness connector. If not you can simply solder wires direct to the connector. Similar to [this](http://rusefi.com/forum/viewtopic.php?f=4&t=507)
|
||||

|
||||

|
||||
* Wire rusEFI like Frankenstein as shown below
|
||||
|
|
@ -82,7 +82,7 @@ http://www.littelfuse.com/~/media/automotive/datasheets/fuses/passenger-car-and-
|
|||
* Connect 12V system / battery to the IO board connector.
|
||||
* Calibrate the sensors using TS and Java console as required.
|
||||
* Crank engine and see RPM's are registering correctly on the Java Console.
|
||||
* Connect LED to pins TODO, which will blink at TDC. Verify that TDC is correct by shining on a crank wheel like a timing light. PS: actually right now we do not have this - see https://sourceforge.net/p/rusefi/tickets/291/
|
||||
* Connect LED to pins TODO, which will blink at TDC. Verify that TDC is correct by shining on a crank wheel like a timing light. PS: actually right now we do not have this - see [https://github.com/rusefi/rusefi/issues/297](https://github.com/rusefi/rusefi/issues/297) and [https://github.com/rusefi/rusefi/issues/2732](https://github.com/rusefi/rusefi/issues/2732) and [https://github.com/rusefi/rusefi/issues/3120](https://github.com/rusefi/rusefi/issues/3120)
|
||||
* Connect injectors and ignition as required and see if it will start.
|
||||
|
||||
### Testing the wiring
|
||||
|
|
@ -149,7 +149,7 @@ There are three ways to produce similar logs - the intention is for these three
|
|||
2. rusEFI console logging
|
||||
3. TunerStudio logging
|
||||
|
||||
See also https://svn.code.sf.net/p/rusefi/code/trunk/firmware/console/binary/tunerstudio_configuration.h
|
||||
See also [https://github.com/rusefi/rusefi/blob/master/firmware/console/binary/output_channels.txt](https://github.com/rusefi/rusefi/blob/master/firmware/console/binary/output_channels.txt)
|
||||
|
||||
See also [Error Codes](Error-Codes)
|
||||
|
||||
|
|
@ -157,7 +157,7 @@ See also [Debug Fields](Debug-Fields)
|
|||
|
||||
## External links
|
||||
|
||||
https://www.youtube.com/watch?v=lgvt0mh_UB8
|
||||
[Fuel injectors at first start](https://www.youtube.com/watch?v=lgvt0mh_UB8)
|
||||
|
||||
|
||||
## Diagnostics and trouble shooting of your engine
|
||||
|
|
|
|||
|
|
@ -1,4 +1,4 @@
|
|||
https://rusefi.com/forum/viewtopic.php?t=1692
|
||||
[Making my 190e More Fun (M111 SC Swap)](https://rusefi.com/forum/viewtopic.php?t=1692)
|
||||
|
||||
[Case info](https://rusefi.com/forum/viewtopic.php?p=39163#p39163)
|
||||
|
||||
|
|
|
|||
|
|
@ -12,7 +12,7 @@ See also [Mazda-Miata-2003](Mazda-Miata-2003)
|
|||
A plug and play adapter board has been developped to get the car to work as easy as possible. It only requires sourcing a tock harness plug and Ampseal 23 pins headers if you want auxiliary functions.
|
||||
More informations are available at this link :
|
||||
|
||||
https://rusefi.com/forum/viewtopic.php?f=4&t=1701
|
||||
[Proteus Plug and Play board for Miata/MX5 NB2 (72 pins)](https://rusefi.com/forum/viewtopic.php?f=4&t=1701)
|
||||
|
||||

|
||||
|
||||
|
|
|
|||
|
|
@ -77,7 +77,7 @@ There are three ways to produce similar logs - the intention is for these three
|
|||
2. rusEFI console logging
|
||||
3. TunerStudio logging
|
||||
|
||||
See also https://svn.code.sf.net/p/rusefi/code/trunk/firmware/console/binary/tunerstudio_configuration.h
|
||||
See also [https://github.com/rusefi/rusefi/blob/master/firmware/console/binary/output_channels.txt](https://github.com/rusefi/rusefi/blob/master/firmware/console/binary/output_channels.txt)
|
||||
|
||||
See also [Error Codes](Error-Codes)
|
||||
|
||||
|
|
@ -85,7 +85,7 @@ See also [Debug Fields](Debug-Fields)
|
|||
|
||||
## External links
|
||||
|
||||
https://www.youtube.com/watch?v=lgvt0mh_UB8
|
||||
[Fuel injectors at first start](https://www.youtube.com/watch?v=lgvt0mh_UB8)
|
||||
|
||||
|
||||
## Diagnostics and trouble shooting of your engine
|
||||
|
|
|
|||
|
|
@ -6,7 +6,7 @@
|
|||
|
||||
Before getting in touch for some assistance there are a couple of things to know that will make it easy for us to help you.
|
||||
|
||||
First off before asking for help, please check the rest of the [wiki,](HOWTO-Search-on-rusEFI-wiki) Take a look through the [forum](https://rusefi.com/forum/search.php) or read through the [FAQs.](Pages-FAQs)
|
||||
First off before asking for help, please check the rest of the [wiki,](HOWTO-Search-on-rusEFI-wiki) Take a look through the [forum]([https://rusefi.com/forum](https://rusefi.com/forum)/search.php) or read through the [FAQs.](Pages-FAQs)
|
||||
|
||||
If after that you still need direct help then please have a read of the information below and help us to help you.
|
||||
|
||||
|
|
@ -17,7 +17,7 @@ Once your issue is resolved please write up how you got things resolved.
|
|||
|
||||
# Persistence
|
||||
|
||||
https://rusefi.com/forum and https://github.com/rusefi/ are two permanent systems of record for any rusEFI knowledge. rusEFI Slack does NOT keep history. Anything you say on Slack would get hidden after about 15 days. All valuable data and content has to be persisted outside of Slack.
|
||||
[https://rusefi.com/forum](https://rusefi.com/forum) and [https://github.com/rusefi/](https://github.com/rusefi/) are two permanent systems of record for any rusEFI knowledge. rusEFI Slack does NOT keep history. Anything you say on Slack would get hidden after about 15 days. All valuable data and content has to be persisted outside of Slack.
|
||||
|
||||
## Please record and post a relevant log file. There are two ways to get a log file:
|
||||
|
||||
|
|
@ -32,15 +32,15 @@ See also [Knowledge-best-practices-and-Channels](Knowledge-best-practices-and-Ch
|
|||
|
||||
See also <a href="https://en.wikipedia.org/wiki/BLUF_(communication)">https://en.wikipedia.org/wiki/BLUF_(communication)</a>
|
||||
|
||||
https://opensource.com/life/16/10/how-ask-technical-questions
|
||||
[How to ask technical questions](https://opensource.com/life/16/10/how-ask-technical-questions)
|
||||
|
||||
https://stackoverflow.com/help/how-to-ask
|
||||
[How To Ask](https://stackoverflow.com/help/how-to-ask)
|
||||
|
||||
https://forum.freecadweb.org/viewtopic.php?f=3&t=5236
|
||||
[FreeCAD's Bug Submission Guidelines](https://forum.freecadweb.org/viewtopic.php?f=3&t=5236)
|
||||
|
||||
An example of a question asked with helpful background information:
|
||||
|
||||
https://rusefi.com/forum/viewtopic.php?f=3&t=1282&start=101
|
||||
[https://rusefi.com/forum](https://rusefi.com/forum)/viewtopic.php?f=3&t=1282&start=101
|
||||
|
||||
|
||||

|
||||
|
|
|
|||
|
|
@ -1,4 +1,4 @@
|
|||
* Please have a separate https://rusefi.com/forum forum thread for each of your rusEFI vehicles. Please have at least one picture in the first forum post.
|
||||
* Please have a separate [forum](https://rusefi.com/forum) thread for each of your rusEFI vehicles. Please have at least one picture in the first forum post.
|
||||
|
||||
* Please upload your best rusEFI tune to rusEFI Online [HOWTO-upload-tune](HOWTO-upload-tune)
|
||||
|
||||
|
|
|
|||
|
|
@ -3,17 +3,17 @@ tools written in java.
|
|||
|
||||
Most of the needs are within the C/C++ firmware and automated testing.
|
||||
|
||||
A good first contribution could be adding some automated testing into https://github.com/rusefi/rusefi/tree/master/unit_tests/tests
|
||||
A good first contribution could be adding some automated testing into [https://github.com/rusefi/rusefi/tree/master/unit_tests/tests](https://github.com/rusefi/rusefi/tree/master/unit_tests/tests)
|
||||
|
||||
For current coverage report see https://rusefi.com/docs/unit_tests_coverage/
|
||||
For current coverage report see [https://rusefi.com/docs/unit_tests_coverage/](https://rusefi.com/docs/unit_tests_coverage/)
|
||||
|
||||
Doxygen source code documentation is found [here.](https://rusefi.com/docs/html/)
|
||||
|
||||
Our primary tool-chain is GCC+Eclipse but we also support IAR.
|
||||
|
||||
Testing coverage open tickets: https://github.com/rusefi/rusefi/labels/automated_testing
|
||||
Testing coverage open tickets: [https://github.com/rusefi/rusefi/labels/automated_testing](https://github.com/rusefi/rusefi/labels/automated_testing)
|
||||
|
||||
All open tickets: https://github.com/rusefi/rusefi/issues
|
||||
All open tickets: [https://github.com/rusefi/rusefi/issues](https://github.com/rusefi/rusefi/issues)
|
||||
|
||||
See [Try It](Try-It) for how to work on rusEFI code with zero or minimal hardware.
|
||||
|
||||
|
|
|
|||
|
|
@ -17,7 +17,7 @@ We are also extremely short on software developers. [HOWTO contribute to firmwar
|
|||
|
||||
We hope that as a community we can leverage each other's skills and have peaceful fun together.
|
||||
|
||||
We probably would not articulate the guiding principles better than https://github.com/betaflight/betaflight/blob/master/docs/development/Development.md and https://github.com/betaflight/betaflight/blob/master/CONTRIBUTING.md
|
||||
We probably would not articulate the guiding principles better than [https://github.com/betaflight/betaflight/blob/master/docs/development/Development.md](https://github.com/betaflight/betaflight/blob/master/docs/development/Development.md) and [https://github.com/betaflight/betaflight/blob/master/CONTRIBUTING.md](https://github.com/betaflight/betaflight/blob/master/CONTRIBUTING.md)
|
||||
|
||||
#### Last but not least
|
||||
|
||||
|
|
@ -25,6 +25,6 @@ Since 2012 until today, this is just a hobby project with zero paid employees. T
|
|||
|
||||
There are two ways to help financially:
|
||||
|
||||
One-time or monthly https://tinyurl.com/paypal-rusefi
|
||||
One-time or monthly [https://tinyurl.com/paypal-rusefi](https://tinyurl.com/paypal-rusefi)
|
||||
|
||||
One-time or monthly [rusEFI Patreon](https://www.patreon.com/rusefi)
|
||||
|
|
|
|||
|
|
@ -6,4 +6,4 @@ Once you've done something interesting, hit "Data Logging" -> "Stop"
|
|||
Then hit "Data Logging" -> "Show DataLog Folder"
|
||||
|
||||
|
||||
At this point you can upload your log at https://rusefi.com/online/
|
||||
At this point you can upload your log at [https://rusefi.com/online/](https://rusefi.com/online/)
|
||||
|
|
@ -4,7 +4,7 @@ We are only starting so some usability would be less than perfect in the beginni
|
|||
|
||||
In order to be able to post your tune you would need to to have your Engine Make, Engine Code and Vehicle Name fields filled in. Close TunerStudio project once you've made engine name changes for file to be updated.
|
||||
|
||||
Now you are ready to hit "Upload" button on https://rusefi.com/online/ and point it a CurrentTune.msq file
|
||||
Now you are ready to hit "Upload" button on [https://rusefi.com/online/](https://rusefi.com/online/) and point it a CurrentTune.msq file
|
||||
|
||||

|
||||
|
||||
|
|
|
|||
|
|
@ -1,8 +1,8 @@
|
|||
Install http://play.google.com/store/apps/details?id=com.msdroid - see also http://www.msdroid.com/
|
||||
Install [MSDroid](http://play.google.com/store/apps/details?id=com.msdroid) - see also [http://www.msdroid.com/](http://www.msdroid.com/)
|
||||
|
||||
Then you need to save this file: https://svn.code.sf.net/p/rusefi/code/trunk/firmware/tunerstudio/rusefi.ini on your Android device.
|
||||
Then you need to copy the rusefi.ini from your firmware bundle to your Android device.
|
||||
|
||||
Move the rusefi.ini file you've just downloaded to MSDroid/ini folder (I've used https://play.google.com/store/apps/details?id=com.estrongs.android.pop for that)
|
||||
Save the rusefi.ini file to the MSDroid/ini folder.
|
||||
|
||||
In order to connect msDroid to rusEFI you would need to tap 'App settings' and select the paired Bluetooth device. As of today, msDroid does not turn Bluetooth on automatically.
|
||||
|
||||
|
|
|
|||
|
|
@ -19,4 +19,4 @@ See [HOWTO Remote Tuning](HOWTO-Remote-Tuning)
|
|||

|
||||
|
||||
|
||||
For development details see https://github.com/rusefi/web_backend
|
||||
For development details see [https://github.com/rusefi/web_backend](https://github.com/rusefi/web_backend)
|
||||
|
|
|
|||
|
|
@ -4,4 +4,4 @@ rusEFI TunerStudio plugin facilitates tune & logs upload.
|
|||
|
||||
rusEFI Plugin allows to continuously upload tune as you edit it. If you are offline, tunes are saved into Outbox folder and get uploaded once you gain connectivity.
|
||||
|
||||
https://www.youtube.com/watch?v=PozvQICdHWQ
|
||||
[rusEFI Online Plugin Alpha version demo](https://www.youtube.com/watch?v=PozvQICdHWQ)
|
||||
|
|
@ -7,7 +7,7 @@ Remove the green brain board from the ECU and remove all cables. Power brain boa
|
|||
|
||||

|
||||
|
||||
Download latest http://rusefi.com/build_server/rusefi_bundle.zip
|
||||
Download latest [http://rusefi.com/build_server/rusefi_bundle.zip](http://rusefi.com/build_server/rusefi_bundle.zip)
|
||||
Run rusefi_console.exe hit Erase, then hit Program
|
||||
|
||||

|
||||
|
|
|
|||
|
|
@ -6,6 +6,6 @@
|
|||
|
||||
|
||||
`rusefi.ini` is TunerStudio project template file, you would use it if you use TunerStudio software to tune your rusEFI unit.
|
||||
See http://www.tunerstudio.com/index.php/downloads for TunerStudio download
|
||||
[TunerStudio Download](http://www.tunerstudio.com/index.php/downloads)
|
||||
|
||||
See http://rusefi.com and https://github.com/rusefi/rusefi_documentation for more information about rusEFI
|
||||
See [http://rusefi.com](http://rusefi.com) and [the rusEFI Wiki](https://wiki.rusefi.com) for more information about rusEFI
|
||||
|
|
|
|||
|
|
@ -3,7 +3,7 @@
|
|||
A proper ECU has to offer users as much flexibility as possible, meaning a completely user-defined control strategy for both primary and auxiliary actuators. For many years rusEFI had FSIO to do just that.
|
||||
|
||||
As of 2021, rusEFI is replacing FSIO with a popular open source [Lua scripting engine](https://en.wikipedia.org/wiki/Lua_(programming_language))
|
||||
We use Lua https://www.lua.org/ version 5.4.3
|
||||
We use [Lua](https://www.lua.org/) version 5.4.3
|
||||
|
||||
## Conventions
|
||||
|
||||
|
|
@ -45,7 +45,7 @@ end
|
|||
|
||||
For example ``getOutput("clutchUpState")`` ``getOutput("brakePedalState")``
|
||||
|
||||
See https://github.com/rusefi/rusefi/blob/master/firmware/controllers/lua/generated/output_lookup_generated.cpp for output names.
|
||||
See [https://github.com/rusefi/rusefi/blob/master/firmware/controllers/lua/generated/output_lookup_generated.cpp](https://github.com/rusefi/rusefi/blob/master/firmware/controllers/lua/generated/output_lookup_generated.cpp) for output names.
|
||||
|
||||
### `setClutchUpState(value)`
|
||||
|
||||
|
|
@ -55,7 +55,7 @@ See https://github.com/rusefi/rusefi/blob/master/firmware/controllers/lua/genera
|
|||
|
||||
Gets current calibration value for specified scalar setting. For example ``getCalibration("cranking.rpm")``
|
||||
|
||||
See https://github.com/rusefi/rusefi/blob/master/firmware/controllers/lua/generated/value_lookup_generated.cpp for field names.
|
||||
See [https://github.com/rusefi/rusefi/blob/master/firmware/controllers/lua/generated/value_lookup_generated.cpp](https://github.com/rusefi/rusefi/blob/master/firmware/controllers/lua/generated/value_lookup_generated.cpp) for field names.
|
||||
|
||||
### `setCalibration(name, value, needEvent)`
|
||||
|
||||
|
|
@ -373,4 +373,4 @@ dutyCycle = table3d(tableIndex, TurbochargerSpeed, tps)
|
|||
|
||||
## See also
|
||||
|
||||
http://lua-users.org/wiki/TernaryOperator
|
||||
[Lua Ternary Operator](http://lua-users.org/wiki/TernaryOperator)
|
||||
|
|
|
|||
|
|
@ -2,7 +2,7 @@ TL,DR: always looking for C/C++/PHP/Java developers!
|
|||
|
||||
rusEFI is a group of enthusiasts developing a fundamentally _smarter_ open source ECU. As of 2021, we have built an amazing foundation but there are still too many loose ends for end users to run an engine successfully without keeping close tabs on development. Current hardware and software offerings aim to cater to those interested in further development. In fact, the level of active development currently makes rusEFI primarily a tinkering platform not a engine management product.
|
||||
|
||||
See also https://github.com/rusefi/rusefi/blob/master/misc/Strategy_2021.md
|
||||
See also [https://github.com/rusefi/rusefi/blob/master/misc/Strategy_2021.md](https://github.com/rusefi/rusefi/blob/master/misc/Strategy_2021.md)
|
||||
|
||||
Interested to tinker with us? [Hardware](Hardware)
|
||||
|
||||
|
|
|
|||
|
|
@ -4,8 +4,8 @@ This is a repository of a bunch of info relevant to fitting rusEFI to the older
|
|||
|
||||
## Early Motronic Ti Signal (Fuel Consumption)
|
||||
|
||||
https://www.msextra.com/forums/viewtopic.php?f=131&t=59516&start=20
|
||||
https://www.msextra.com/forums/viewtopic.php?f=131&t=53920
|
||||
[BMW MPG gauge and MS3](https://www.msextra.com/forums/viewtopic.php?f=131&t=59516&start=20)
|
||||
[OBC input signal, correcting signal options](https://www.msextra.com/forums/viewtopic.php?f=131&t=53920)
|
||||
|
||||
Load Signal (Ti):
|
||||
is produced by the ECM as an output function that represents the actual amount of fuel injected.
|
||||
|
|
@ -30,7 +30,7 @@ you could actually run it with general purpose pwm pretty easily
|
|||
|
||||
## 88 pin Motronic pinouts
|
||||
|
||||
https://docs.google.com/spreadsheets/d/1OiEaak7TElKwF-fXWvl9Dk-fD84a0NENe6lOwhXiOe4/
|
||||
[88 pin ECU pinout](https://docs.google.com/spreadsheets/d/1OiEaak7TElKwF-fXWvl9Dk-fD84a0NENe6lOwhXiOe4/)
|
||||
|
||||
|
||||
|
||||
|
|
@ -65,4 +65,4 @@ BMW [5 Series E39](BMW-e39) 1995–May 2004
|
|||
The E46 switched from a different ABS partway through production (I think 2003). The earlier units don't work. I believe the M3 devices have programming that is more suitable for track use, but that the non-M3 are still considered quite good (the differences are pretty qualitative and I haven't seen any real back to back comparison). Some of the M3 units are also flashable with special race tunes including one that is fully programmable. So short answer is you CAN use pretty much any Teves Mk60 from E46, but the M3 unit is often preferred. MINI's and some VAG cars of similar years also came with the Teves
|
||||
Mk60 and I believe those can also be used
|
||||
There are a subset of MK60 units that can be used for Race ABS applications which requires a bench flash of a map specifically set to your chassis. Any ZCP/CSL unit can accept the Race ABS programming and any E46 M3 MK60 who's computer number ends in 813.3 can also.
|
||||
There are e46 m3 units that end with 818.3 which can't be flashed with the race program.
|
||||
There are e46 m3 units that end with 818.3 which can't be flashed with the race program.
|
||||
|
|
|
|||
|
|
@ -3,6 +3,6 @@ _Please do not build your own abs_
|
|||
1996-2000 Honda Civic ABS SET UP could be a rare example of solenoids and control units not in the same body.
|
||||
|
||||
|
||||
http://info.3dmmotorsport.com/mk60-motorsport-abs-standalone-guide
|
||||
[broken link](http://info.3dmmotorsport.com/mk60-motorsport-abs-standalone-guide)
|
||||
|
||||
https://forums.turbobricks.com/showthread.php?t=344953
|
||||
[Modern ABS for a tracked 240 (Teves MK60 swap)](https://forums.turbobricks.com/showthread.php?t=344953)
|
||||
|
|
@ -28,7 +28,7 @@ Bosch 0280750074 68mm
|
|||
|
||||
Hitachi SERA576-01 60mm diameter
|
||||
|
||||
M6 58mm bolt, internal hex cap see https://rusefi.com/forum/viewtopic.php?p=37682#p37682
|
||||
M6 58mm bolt, internal hex cap see [this forum post](https://rusefi.com/forum/viewtopic.php?p=37682#p37682)
|
||||
|
||||
2003 Nissan Altima green plug
|
||||
|
||||
|
|
@ -64,6 +64,6 @@ WARNING GND#1<>GND#2 are mixed up on the image.
|
|||
|
||||
# Outside information
|
||||
|
||||
See https://rusefi.com/forum/viewtopic.php?f=2&t=2077 TODO move content to here
|
||||
See [this forum thread](https://rusefi.com/forum/viewtopic.php?f=2&t=2077) TODO move content to here
|
||||
|
||||
lots of useful information here https://www.maxxecu.com/webhelp/wirings-e-throttle_bodies.html
|
||||
lots of useful information [here](https://www.maxxecu.com/webhelp/wirings-e-throttle_bodies.html)
|
||||
|
|
|
|||
|
|
@ -7,7 +7,7 @@
|
|||
|
||||
[1995 Honda Accord](Honda-Accord-1995)
|
||||
|
||||
https://ff-squad.com/wp/?paged=2&cat=17
|
||||
[ECU Pin diagrams](https://ff-squad.com/wp/?paged=2&cat=17)
|
||||
|
||||
# OBD-2
|
||||
[OBD2 connector part number](OEM-connectors#104)
|
||||
|
|
|
|||
|
|
@ -23,7 +23,7 @@ Pin #3 "Negative" from igniter
|
|||
|
||||
## Ignition Modules (aka "ignitors")
|
||||
* VW 1.8t 4 cylinder module - PN _4D0905351_
|
||||
For igniter location see https://www.youtube.com/watch?v=X-iyKYUeGvc
|
||||
For igniter location see [broken link](https://www.youtube.com/watch?v=X-iyKYUeGvc)
|
||||
Tested and working with BMW Coils, uses a pair of ampseal plugs (easily available on ebay). Wiring layout available on the forum.
|
||||
Plugs - TE 282193-1 x1, TE 282192-1 x1, TE 929937-3 x9, TE 828905-1 x9
|
||||
Also known as: VW Audi 97- 05 - Bosch PN _0227100211_
|
||||
|
|
@ -51,7 +51,7 @@ Harness side connector Sumitomo _6189-0515_ Toyota _90980-11653_
|
|||
|
||||

|
||||
|
||||
* rusEFI's own BTS2140 module http://rusefi.com/forum/viewtopic.php?f=4&t=286
|
||||
* [rusEFI's own BTS2140 module](http://rusefi.com/forum/viewtopic.php?f=4&t=286)
|
||||
|
||||

|
||||
|
||||
|
|
|
|||
|
|
@ -31,7 +31,7 @@ Alex has M111 1.8 (now swaped M111.961)
|
|||
|
||||
M113K is 113.990 or 113.991? Looks like 134 pin connector?
|
||||
|
||||
M156 looks like 154 pin connector? http://benz.ehost.tj/ is amazing?
|
||||
M156 looks like 154 pin connector? [WebETM Starfinder](http://benz.ehost.tj/) is amazing?
|
||||
|
||||
2011 W212 E63 1569001300 ME9.7
|
||||
|
||||
|
|
|
|||
|
|
@ -3,13 +3,13 @@
|
|||
|
||||
Cross linked polyethylene insulation recommended.
|
||||
|
||||
https://www.waytekwire.com/item/WM20-3/WM20-3-Automotive-Cross-Link-Wire-/ Orange
|
||||
https://www.waytekwire.com/item/WM20-6/WM20-6-Automotive-Cross-Link-Wire-/ Blue
|
||||
[Waytek TXL Wire 20GA](https://www.waytekwire.com/item/WM20-3/WM20-3-Automotive-Cross-Link-Wire-/) Orange
|
||||
[Waytek TXL Wire 20GA](https://www.waytekwire.com/item/WM20-6/WM20-6-Automotive-Cross-Link-Wire-/) Blue
|
||||
|
||||
Twisted Shielded Cable
|
||||
For knock/VR/CAN
|
||||
|
||||
https://prowireusa.com//p-572-22-awg-x-2-shieled-cable.aspx M27500-22SB2T23
|
||||
[22 AWG x2 Shielded Cable](https://prowireusa.com//p-572-22-awg-x-2-shieled-cable.aspx) M27500-22SB2T23
|
||||
|
||||
|
||||
PVC insulation like UL1007-20AWG acceptable but second choice.
|
||||
PVC insulation like UL1007-20AWG acceptable but second choice.
|
||||
|
|
|
|||
|
|
@ -143,7 +143,7 @@ Injector Flow Rate
|
|||
|
||||
<details><summary><u>IGBT</u></summary>
|
||||
|
||||
http://en.wikipedia.org/wiki/Insulated-gate_bipolar_transistor
|
||||
[Wikipedia - IGBT](http://en.wikipedia.org/wiki/Insulated-gate_bipolar_transistor)
|
||||
A common type of transistor used for switching high power devices like ignition coils with a low power/voltage output.
|
||||
</details>
|
||||
|
||||
|
|
@ -219,7 +219,7 @@ Negative temperature coefficient, used in context of temperature sensors and ref
|
|||
|
||||
<details><summary><u>PIP</u></summary>
|
||||
|
||||
Profile ignition pickup See http://en.wikipedia.org/wiki/Profile_ignition_pickup
|
||||
Profile ignition pickup See [Wikipedia - Profile Ignition Pickup](http://en.wikipedia.org/wiki/Profile_ignition_pickup)
|
||||
</details>
|
||||
|
||||
<details><summary><u>PFI</u></summary>
|
||||
|
|
|
|||
|
|
@ -2,28 +2,28 @@
|
|||
|
||||
List of threads with existing limp info:
|
||||
|
||||
https://github.com/rusefi/rusefi/issues/2244 - Limp mode affecting the unit tests
|
||||
https://github.com/rusefi/rusefi/issues/932 - Limp mode for MAP failure
|
||||
https://github.com/rusefi/rusefi/issues/2125 - Fail second ETB when other is down
|
||||
https://github.com/rusefi/rusefi/issues/2258 - Time since boot should be included in main relay logic
|
||||
https://github.com/rusefi/rusefi/issues/2073 - Try to check which trigger wheel the signal is coming from to allow limp from second trigger
|
||||
https://github.com/rusefi/rusefi/issues/2058 - better handling of FSIO fails
|
||||
https://github.com/rusefi/rusefi/issues/1604 - Allow negative values for the TPS
|
||||
https://github.com/rusefi/rusefi/issues/1535 - Rev limit with ETB
|
||||
https://github.com/rusefi/rusefi/issues/1444 - Use pin input to trigger a log
|
||||
https://github.com/rusefi/rusefi/issues/1236 - ETB feedback logic
|
||||
https://github.com/rusefi/rusefi/issues/987 - Better handling of unexpected trigger shape
|
||||
https://github.com/rusefi/rusefi/issues/936 - Misfire detection
|
||||
https://github.com/rusefi/rusefi/issues/932 - Fail safe mode/limp mode for MAP failure
|
||||
https://github.com/rusefi/rusefi/issues/680 - Document TS FSIO formulas
|
||||
https://github.com/rusefi/rusefi/issues/468 - TPS vs MAP error detection logic
|
||||
https://github.com/rusefi/rusefi/issues/455 - RPM hard limit depending on CLT
|
||||
https://github.com/rusefi/rusefi/issues/202 - Knock reaction
|
||||
https://github.com/rusefi/rusefi/issues/95 - per-injector performance correction
|
||||
[https://github.com/rusefi/rusefi/issues/2244](https://github.com/rusefi/rusefi/issues/2244) - Limp mode affecting the unit tests
|
||||
[https://github.com/rusefi/rusefi/issues/932](https://github.com/rusefi/rusefi/issues/932) - Limp mode for MAP failure
|
||||
[https://github.com/rusefi/rusefi/issues/2125](https://github.com/rusefi/rusefi/issues/2125) - Fail second ETB when other is down
|
||||
[https://github.com/rusefi/rusefi/issues/2258](https://github.com/rusefi/rusefi/issues/2258) - Time since boot should be included in main relay logic
|
||||
[https://github.com/rusefi/rusefi/issues/2073](https://github.com/rusefi/rusefi/issues/2073) - Try to check which trigger wheel the signal is coming from to allow limp from second trigger
|
||||
[https://github.com/rusefi/rusefi/issues/2058](https://github.com/rusefi/rusefi/issues/2058) - better handling of FSIO fails
|
||||
[https://github.com/rusefi/rusefi/issues/1604](https://github.com/rusefi/rusefi/issues/1604) - Allow negative values for the TPS
|
||||
[https://github.com/rusefi/rusefi/issues/1535](https://github.com/rusefi/rusefi/issues/1535) - Rev limit with ETB
|
||||
[https://github.com/rusefi/rusefi/issues/1444](https://github.com/rusefi/rusefi/issues/1444) - Use pin input to trigger a log
|
||||
[https://github.com/rusefi/rusefi/issues/1236](https://github.com/rusefi/rusefi/issues/1236) - ETB feedback logic
|
||||
[https://github.com/rusefi/rusefi/issues/987](https://github.com/rusefi/rusefi/issues/987) - Better handling of unexpected trigger shape
|
||||
[https://github.com/rusefi/rusefi/issues/936](https://github.com/rusefi/rusefi/issues/936) - Misfire detection
|
||||
[https://github.com/rusefi/rusefi/issues/932](https://github.com/rusefi/rusefi/issues/932) - Fail safe mode/limp mode for MAP failure
|
||||
[https://github.com/rusefi/rusefi/issues/680](https://github.com/rusefi/rusefi/issues/680) - Document TS FSIO formulas
|
||||
[https://github.com/rusefi/rusefi/issues/468](https://github.com/rusefi/rusefi/issues/468) - TPS vs MAP error detection logic
|
||||
[https://github.com/rusefi/rusefi/issues/455](https://github.com/rusefi/rusefi/issues/455) - RPM hard limit depending on CLT
|
||||
[https://github.com/rusefi/rusefi/issues/202](https://github.com/rusefi/rusefi/issues/202) - Knock reaction
|
||||
[https://github.com/rusefi/rusefi/issues/95](https://github.com/rusefi/rusefi/issues/95) - per-injector performance correction
|
||||
|
||||
https://rusefi.com/forum/viewtopic.php?f=5&t=1952&p=40009 - Fw. improvement - PANIC BUTTON
|
||||
https://rusefi.com/forum/viewtopic.php?f=5&t=1900&p=39412 - Limp Home and Engine Protection
|
||||
https://rusefi.com/forum/viewtopic.php?f=5&t=1469&p=39327 - Software knock processing
|
||||
[https://rusefi.com/forum/viewtopic.php?f=5&t=1952&p=40009](https://rusefi.com/forum/viewtopic.php?f=5&t=1952&p=40009) - Fw. improvement - PANIC BUTTON
|
||||
[https://rusefi.com/forum/viewtopic.php?f=5&t=1900&p=39412](https://rusefi.com/forum/viewtopic.php?f=5&t=1900&p=39412) - Limp Home and Engine Protection
|
||||
[https://rusefi.com/forum/viewtopic.php?f=5&t=1469&p=39327](https://rusefi.com/forum/viewtopic.php?f=5&t=1469&p=39327) - Software knock processing
|
||||
|
||||
|
||||
# Control methods and logic:
|
||||
|
|
@ -98,4 +98,4 @@ This MUST only be the case for truly fatal errors where the consequences of keep
|
|||
### Load sensor failure
|
||||
Loss of primary load sensor (MAP, TPS or MAF) is currently a problem that will leave the engine inoperable.
|
||||
|
||||
###
|
||||
###
|
||||
|
|
|
|||
|
|
@ -4,19 +4,19 @@ With all the electromagnetic interference around the gasoline engine due to spar
|
|||
|
||||
[ISO 15765-2](PDFs/ISO-15765-2-2004.pdf), or ISO-TP (Transport Layer), helps us exchange up to 4096 packets into which we wrap TS protocol. See also [wikipedia](https://en.wikipedia.org/wiki/ISO_15765-2)
|
||||
|
||||
https://github.com/rusefi/rusefi/tree/master/java_console/io/src/main/java/com/rusefi/io/can folder has java implementation of ISO-TP packet encoding/decoding.
|
||||
[https://github.com/rusefi/rusefi/tree/master/java_console/io/src/main/java/com/rusefi/io/can](https://github.com/rusefi/rusefi/tree/master/java_console/io/src/main/java/com/rusefi/io/can) folder has java implementation of ISO-TP packet encoding/decoding.
|
||||
|
||||
There is no standard way of communicating with CAN bus on Windows. At the moment rusEFI is focusing on [PCAN by Peak System](https://www.peak-system.com/) and ELM327 options of the Windows side of CAN.
|
||||
There is no standard way of communicating with CAN bus on Windows. At the moment rusEFI is focusing on [PCAN by Peak System]([https://www.peak-system.com/](https://www.peak-system.com/)) and ELM327 options of the Windows side of CAN.
|
||||
|
||||
|
||||
|
||||
# PCAN
|
||||
Between three major professional CAN frontend vendors we like PCAN by https://www.peak-system.com/ due to the combination of the following
|
||||
1) documented Windows DLL drivers with official java wrappers called [PCAN-Basic API](https://www.peak-system.com/PCAN-Basic.239.0.html?&L=1)
|
||||
Between three major professional CAN frontend vendors we like PCAN by [https://www.peak-system.com/](https://www.peak-system.com/) due to the combination of the following
|
||||
1) documented Windows DLL drivers with official java wrappers called [PCAN-Basic API]([https://www.peak-system.com/](https://www.peak-system.com/)PCAN-Basic.239.0.html?&L=1)
|
||||
|
||||
2) https://github.com/moonglow/pcan_cantact open source firmware for [cheeeeeeap third party devices](https://rusefi.com/forum/viewtopic.php?f=13&t=2243 )
|
||||
2) [https://github.com/moonglow/pcan_cantact](https://github.com/moonglow/pcan_cantact) open source firmware for [cheeeeeeap third party devices](https://rusefi.com/forum/viewtopic.php?f=13&t=2243 )
|
||||
|
||||
rusEFI bridge between PCAN and ISO-TP is located at https://github.com/rusefi/rusefi/tree/master/java_console/io/src/main/java/com/rusefi/io/stream
|
||||
rusEFI bridge between PCAN and ISO-TP is located at [https://github.com/rusefi/rusefi/tree/master/java_console/io/src/main/java/com/rusefi/io/stream](https://github.com/rusefi/rusefi/tree/master/java_console/io/src/main/java/com/rusefi/io/stream)
|
||||
|
||||
# ELM327
|
||||
|
||||
|
|
@ -24,6 +24,6 @@ With more than a dozen magic commands it's possible to switch ELM327 device into
|
|||
|
||||
|
||||
|
||||
See https://canhacker.com/ch-obd-m02/ for great pinout image. Yes both GND are needed for reliable ELM327 operation.
|
||||
See [https://canhacker.com/ch-obd-m02/](https://canhacker.com/ch-obd-m02/) for great pinout image. Yes both GND are needed for reliable ELM327 operation.
|
||||
|
||||
https://rusefi.com/forum/viewtopic.php?f=5&t=2233
|
||||
[IsoTp ISO 15765-2 in rusEFI](https://rusefi.com/forum/viewtopic.php?f=5&t=2233)
|
||||
|
|
@ -1,4 +1,4 @@
|
|||
https://rusefi.com/shop/
|
||||
[https://rusefi.com/shop/](https://rusefi.com/shop/)
|
||||
|
||||
У нас есть собранные microRusEFI в Питере.
|
||||
|
||||
|
|
@ -18,10 +18,10 @@ https://rusefi.com/shop/
|
|||
|
||||
После оплаты пожалуйста пишите в Whatsapp или Телеграм +1-773-414-1279
|
||||
|
||||
Покупки лично в Петербурге или доставка через https://cdek.ru/ с оплатой доставки получателем.
|
||||
Покупки лично в Петербурге или доставка через [https://cdek.ru/](https://cdek.ru/) с оплатой доставки получателем.
|
||||
|
||||
|
||||
Кстати, русский чатик https://chat.whatsapp.com/Ey4p7DIDoy299AS1h3ejpB
|
||||
Кстати, русский чатик [https://chat.whatsapp.com/Ey4p7DIDoy299AS1h3ejpB](https://chat.whatsapp.com/Ey4p7DIDoy299AS1h3ejpB)
|
||||
|
||||
|
||||
PS: всё очень добровольно. Всегда есть вариант всё сделать самим, см. https://www.drive2.ru/c/555801204769161551/
|
||||
PS: всё очень добровольно. Всегда есть вариант всё сделать самим, см. [https://www.drive2.ru/c/555801204769161551/](https://www.drive2.ru/c/555801204769161551/)
|
||||
|
|
|
|||
Loading…
Reference in New Issue