mirror of https://github.com/rusefi/stim.git
{kind=link}
readme.md
User Manual
- 12v DC power required
- one microUSB cable required for operation
- sometimes second microUSB is useful for firmware update
- Download Putty
- bottom microUSB is required for operation
- top microUSB is sometimes needed for firmware updates
- blinking blue LD2 means "alive"
- red LD3 means "board has failed test
- green LD1 next to blinking blue means "test successful"
See https://github.com/rusefi/rusefi-hardware/tree/main/digital-inputs for firmware
Part of https://github.com/rusefi/rusefi infrastucture
https://github.com/rusefi/rusefi/wiki/dev-hardware-quality-control
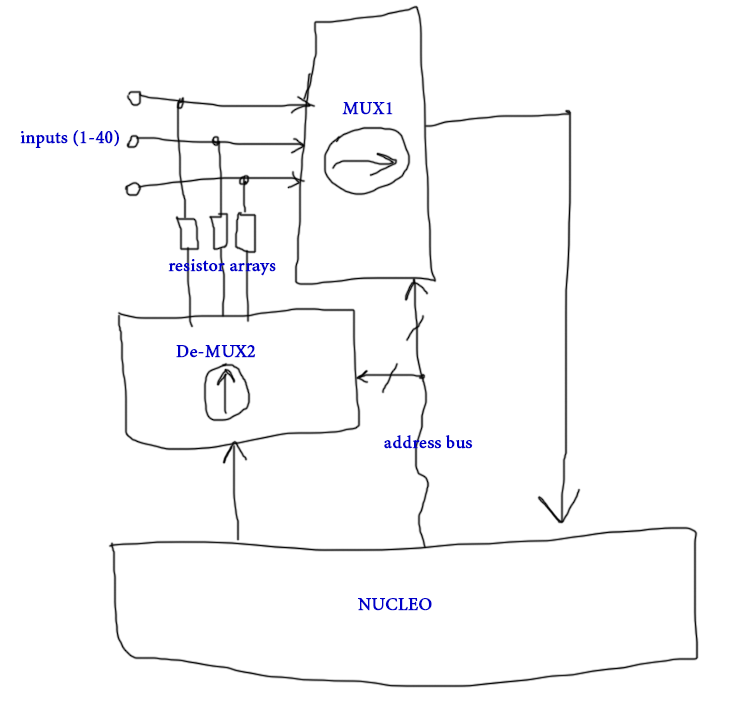
Digital Inputs
- 48 channels of high/low digital inputs
- pin requirment: 4 ADC inputs and 9 GPIO
GPIO:
- output: x4 address pins
- output: x4 test control pins
- output: mux off
See https://github.com/rusefi/stim/issues/6
Changelog
rev C
- CAN board fix
- second CAN board added
- OUT0 pin moved from PA11 to PD8
- https://github.com/rusefi/stim/issues?q=label%3Arev-C+is%3Aclosed
rev 0.2
- CAN bus
- superseal header
rev 0.1
- it works!